Connecting drones with your business has never been so easy
We provide access to a set of APIs to connect your business applications with drones securely.

Benefits
APIs to simplify your drone operations

Hardware Agnostic APIs
Wide compatibility
We have done the heavy lifting to make sure businesses can integrate different off-the-shelf drones (like DJI) and even custom drones based on PX4 and Ardupilot without compatibility issues.
Virtual Drone
Safe application testing
Build and scale your drone applications without compromising on the safety of your drones. Test them in a simulated environment using our virtual drone feature.

Build Apps
Build your own customised drone application easily on a developer trusted platform
01 Navigation API
02 Payload API
03 Vehicle Setup API
04 Command & Control API
05 Telemetry API
06 Video Streaming API
07 Gimbal Control API
08 Mission Planning API
Build Apps
Critical APIs for automated drone operations


Build Apps
Critical APIs for automated drone operations
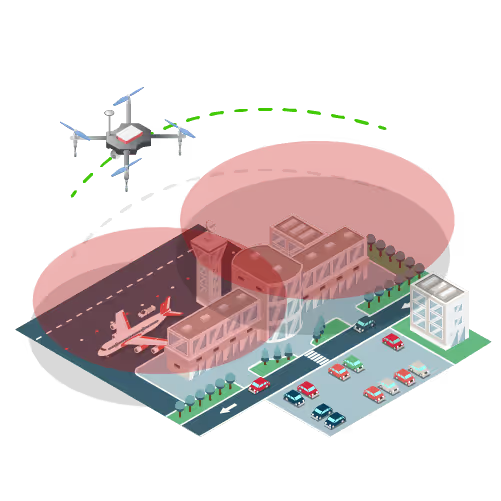
Geofence
Allows the setting of a virtual boundary for drones.
Collision Avoidance
Allows drones to navigate around obstacles.
Drone-in-a-box control & telemetry
Allows integration with Drone-in-a-Box hardware and giving commands of launch and land remotely.
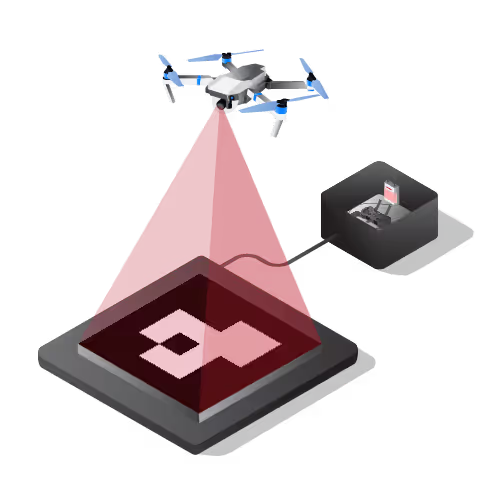
Precision Landing
Enables drones to land precisely on a machine-generated tag.
Features in a nutshell
Rapid Deployment
Develop and deploy complex drone applications a lot faster.
Complete Platform
A platform designed for the widest compatibility and scalability.
Tried and Tested
Our platform is used by 10000+ users worldwide.
Security
All our API endpoints are secure, following best practices.
Priority Support
We will make sure you have the smoothest experience with us.
Detailed Documentation
Never get stuck.Troubleshoot problems easily using our documentation.
Request access & start building.
Join FlytBase’s growing network of integration partners!
